자율주행 시스템 개발(Test Version)
자율주행 시스템 개발(Test Version)
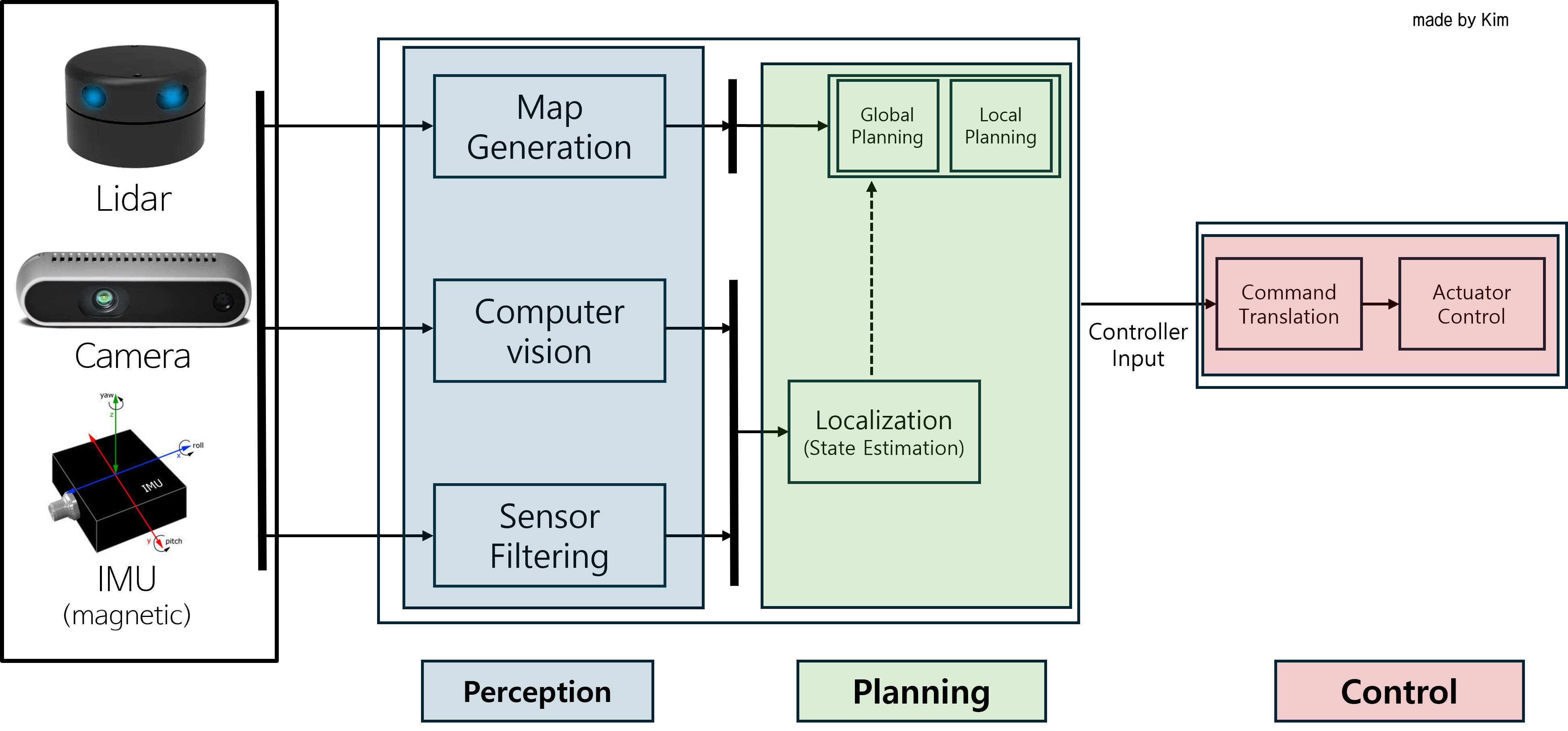
ROS 기반 자율주행 시스템 구조(Test version)
자율주행 시스템은 ROS(Robot Operating System)를 기반으로 센서 데이터부터 주행 제어까지 전체 파이프라인을 효율적으로 관리합니다. 특히 실제 차량에 적용할 때는 명령 변환 계층(Command Translation)이 핵심 요소입니다.
시스템 구성 개요
자율주행 시스템은 크게 세 가지 계층으로 나뉩니다:
- 인지 계층(Perception): 센서로 환경을 인식
- 계획 계층(Planning): 경로 및 행동 계획 수립
- 제어 계층(Control): 실제 차량 명령으로 변환 및 제어
🧠 1. Perception (인지 계층)
환경을 인식하고 주행에 필요한 기본 정보를 생성합니다.
주요 구성요소
- 센서 노드: LiDAR(
/scan), 카메라(/image_raw), IMU(/imu/data) - 필터링: 센서 융합, 노이즈 제거 (
/sensor_fusion_pose) - 인식: 차선 인식(
/lane_markings), 장애물 감지(/obstacle_detected) - 지도 생성: 주행 가능 영역 정의 (
/map)
📍 2. Planning (계획 계층)
인식된 정보를 바탕으로 자율주행 판단을 수행합니다.
위치 추정 (Localization)
- 핵심 노드:
robot_localization,amcl - 입출력: GPS, IMU 데이터 → 정밀 위치 정보(
/tf)
경로 계획
- 전역 경로: 목적지까지의 대략적 경로 (
/global_path) - 행동 결정: 상황별 주행 전략 결정 (
/behavior_state) - 지역 경로: 장애물 회피 등 실시간 경로 조정 (
/trajectory_cmd)
⚙️ 3. Control (제어 계층)
Command Translation (실차 적용의 핵심)
추상적인 ROS 명령을 실제 차량이 이해할 수 있는 저수준 명령으로 변환합니다.
| ROS 명령 | 변환 후 차량 명령 | 인터페이스 |
|---|---|---|
/cmd_vel | 조향, 가속, 제동 | /steer_cmd, /throttle_cmd |
/trajectory_cmd | 경로점별 속도/조향 | CAN/Serial 통신 |
주요 제어 노드
cmd_vel_to_ackermann: 속도/각속도 → Ackermann 조향 변환vehicle_interface: CAN/PWM 기반 차량 제어
🔄 피드백 루프
제어 결과는 센서를 통해 다시 인지 계층으로 피드백되어 폐루프 제어를 구현합니다:
- 명령 실행 → 2. 센서로 결과 측정 → 3. 위치 및 상태 갱신 → 4. 새 명령 생성
📊 시스템 요약
| 계층 | 주요 기능 | 핵심 노드 | 출력 |
|---|---|---|---|
| Perception | 환경 인식 | velodyne_driver, usb_cam | 장애물, 차선, 지도 |
| Planning | 경로 생성 | global_planner, local_planner | 이동 경로, 속도 프로필 |
| Control | 차량 제어 | vehicle_interface | 조향, 가속, 제동 명령 |
💡 실차 적용 시 주요 고려사항
- 하드웨어 통신:
socketcan_bridge(CAN),rosserial(MCU) 활용 - 실시간성: 지연 시간 최소화, 제어 주기 일정하게 유지
- 안전 장치: 비상 정지, 오류 감지, 장애 복구 메커니즘 필수
- 시뮬레이터와 차이점: 실차에서는 하드웨어 변환 노드 필수
결론
ROS 기반 자율주행 시스템은 모듈화된 구조로 개발과 테스트를 용이하게 합니다. 특히 하드웨어 연결 계층을 명확히 설계하고 구현하는 것이 실차 적용의 핵심입니다. 이 구조를 바탕으로 점진적인 구현과 테스트를 진행하면 안정적인 자율주행 시스템을 구축할 수 있습니다.
This post is licensed under CC BY 4.0 by the author.